
【文本】
淘气哥在学习雷达信号处理时,经常会看到两个不同的术语:距离门和距离仓。 有时我个人觉得这两个术语似乎指的是同一件事。 ,而且很多文献资料都认为这两个东西指的是同一个东西。
但仔细思考后,我发现:既然指的是同一件事,为什么要用两个词呢? 这看起来不复杂吗? 科学一向强调简单和美丽,那么这两个术语是否有不同的含义和细微的差别呢?
带着上面的疑问,我开始查各种资料,但是国内外似乎都没有人对这两个概念有明确的解释,而且很多资料都默认了距离门和距离仓都代表着同一个东西,但是我个人坚信这两个概念之间存在一些差异。 我得寻找一些线索来证明自己的想法。 即使论证失败,也能促进我自己的理解。
1.距离门(距离门、波门):距离门
2. Range bin(距离bin,距离单位):range bin
距离门的概念最初起源于模拟电路。
模拟电路中的定义:距离门是在指定时间内选择信号的电子电路。 “门”的含义是指:在这个规定时间内允许信号通过,其他时间不允许信号通过“门”。 因此,关闭状态被称为“门”。 其实通俗理解就是一个开关。 也可以用门功能的模型来理解。
今天,我们可以通过“信号采样模型”来理解“距离门”的概念,理解为什么要使用距离门电路。
其实,在早期的军用雷达中,大多数雷达都采用脉冲系统,测距原理也很简单,就是利用延时法来测量测距。 距离等于时间乘以光速除以2。因此,只要知道时间,就能知道目标。 距离。 但当时还没有ADC芯片,电路无法准确捕捉脉冲回波信号的时间。
不过,智能雷达工程师采用了一种独特的电路,即距离门或称为距离门的开关电路来实现对目标回波时间的采样。 距离门结构如下图所示。
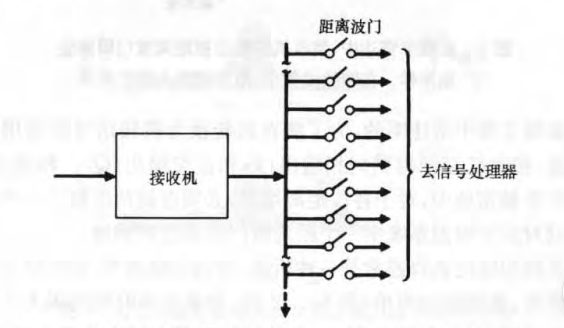
图距离波门
其具体工作原理是:距离波门电路按照特定的时序打开和关闭,相当于自动形成一个采样时间的电路,每个开关对应一个特定的距离。 当有目标回波信号时,如果某一距离门关闭时恰好有信号通过,则通过获取该距离门的序号即可确定目标的距离信息,并将目标信息显示在后续信号处理器。
图距离门采样
如果总共有100个开关,并且每0.01ms依次打开和关闭,那么在理想情况下,可以检测到的最远距离为:
R_{\max }=t_{\max } * c / 2=100 * 0.01 * 10^{-3} * c / 2=150 \{Km}
最小距离为:
R_{\min }=t_{\min } * c / 2=1 * 0.01 * 10^{-3} * c / 2=1.5 \{Km}
其中,最小检测距离1.5Km为距离分辨率。 如果第49个距离门捕获到回波信号,则其代表的距离为:
R_{49}=t_{49} * c / 2=49 * 0.01 * 10^{-3} * c / 2=73.5 \{Km}
因此,距离门相当于一个采样时间的ADC。 其采样间隔(采样频率)和距离范围由雷达工程师根据雷达系统的探测要求独立设定。 当然,这种方法会有一定的缺陷,因为开关闭合的时间间隔对目标的距离分辨率影响很大,但在二战时期,这种方法足以探测敌机。
随着雷达的数字化发展,当采用数字信号处理(DSP)时,测距本质上采用与距离门模拟电路相同的方法。 接收器回波信号的幅度由距离门(ADC 芯片)循环。 采样如下图所示。
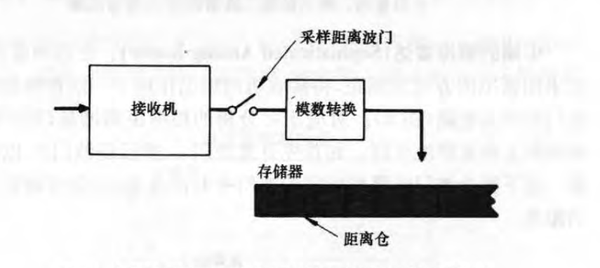
图ADC采样
在这段采样时间内,信号的幅度被量化为数字信号并存储在称为距离bin()的缓冲区中,然后DSP处理器进行下一步处理,例如距离维度FFT、速度维度FFT等人。
根据《机载雷达导论》中的讨论,我们可以得出距离门和距离仓本质上是一个东西,只不过距离门是很早就提出的一种方法和概念,具体来说是一个模拟电路; 而距离仓这是因为数字技术发展后采用的另一种方法与距离门本质上是相同的。 它具体是数字量化的结果。 距离仓也称为距离单位。
随着时代的进步,人们对这两个词的使用已经没有太大的区别。 距离门的概念实际上继承了早期雷达的名称。 现在所有的雷达都应该叫range bin,只是因为大家都习惯了。 以前的名称已被保留下来,因此对今天的初学者造成一些混乱,认为这两个概念是不同的东西。
图距离门
然而,关于距离门的概念还有一件事需要注意。
在现代雷达系统中,跟踪是以数字方式完成的,这里的“距离门”可以包括但不限于:
(1)脉冲压缩/DFT(FFT)后的采样数据中的采样点。 这是最常见的定义之一。 关于这个概念,上面的文章已经做了很多解释,相信读者应该能够理解。
(2) 根据第(1)条的定义,每个采样点都是自己的距离门,可以用来定义距离跨度。
(3)在极限检测/跟踪算法中,距离门用于表示搜索空间的具体值,是一个实时变量。
以上三项基本概括了距离门概念的应用领域。 距离门和距离箱之间存在一些细微差别。 希望读者注意区别。 下面有几个容易混淆的概念,在这里列出来供读者参考,希望能帮助大家理解。
(1)距离选通(range):雷达的距离计算是通过所谓的距离门(rangegate)来控制的,也就是说按照给定的时间间隔对接收到的回波信号进行采样,并且每一个对应一个距离门上的距离。 距离门控可以认为是一个过程量,即在距离门开关关闭的期间,接受或选择一个特定的距离。
(2)距离图像(一维):一维距离图像的概念是针对距离分辨率较高的雷达。 目标在雷达视角下是可区分的,不再是低分辨率雷达视角下的点目标。 顾名思义,一维距离指的是距离维度,“图像”指的是目标在雷达采集门内的多个距离单元的分布。
高分辨率一维距离图像(HRRP)不仅提供了目标的几何形状和结构特征,还包含了目标识别所需的更多相关信息。 一维距离图像实际上是目标上各距离单元的散射强度分布图。 。 这个概念可以在《雷达成像技术》一书中得到更多的理解。
(4)距离维度:距离维度也称为快速时间维度,因为距离维度在同一脉冲内对信号进行采样,且采样率比较高,所以被称为快速时间维度。 速度维度数据的采样时间为脉冲重复周期,采样率较低,因此称为慢时间维度。 距离维度和速度维度这两个概念使用得非常频繁,读者需要牢记在心。
(5)距离方向:SAR成像一般采用距离方向和方位方向。 SAR成像是斜距成像。 沿着轨迹的方向称为方位方向,沿着雷达波发射的方向称为距离方向。
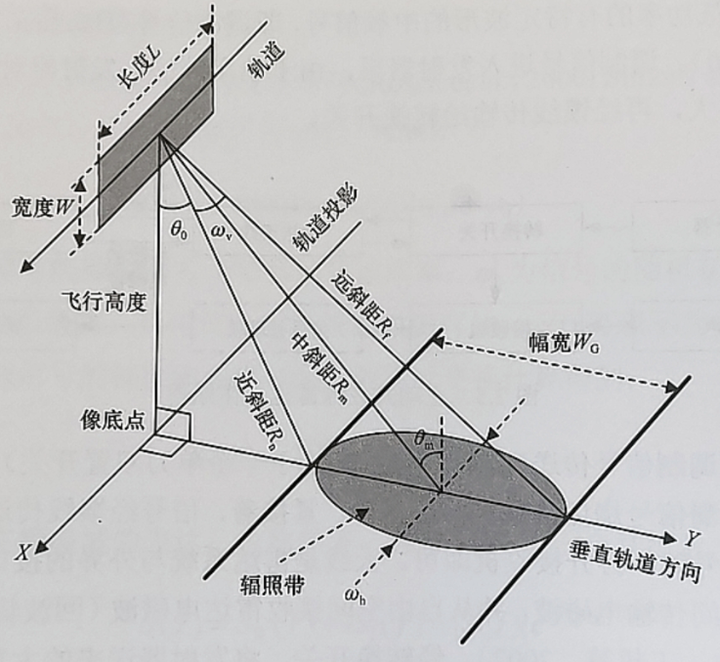
图 SAR成像模型
摘要:本文讨论了距离门和距离仓的由来和区别,还讨论了距离波门、距离门、距离仓、距离仓、距离单位、距离门、距离图像、距离维度、距离方向等概念。 ,希望读者不要困惑。
你看,通过对这些基本概念的分析,我们可以了解雷达的发展历史,窥探早期雷达工程技术人员解决问题的思路。 即使一开始没有ADC采样芯片,他们也能想到用这扇“门”电路来实现时间采样,不得不佩服前人的智慧。
来吧,雷达们!
参考
1.《机载雷达简介》W.
2.《雷达成像技术》包正等。
3.《雷达原理》丁路飞等。
发表评论:
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。