电子干扰是现代电子战的重要组成部分,包括无源干扰和有源干扰。 有源干扰可分为欺骗干扰和掩蔽干扰。 欺骗干扰是利用虚假目标和信息作用于雷达的目标探测和跟踪系统,使雷达无法正确探测真实目标或无法正确测量真实目标的参数信息,从而迷惑或扰乱雷达的探测和跟踪。的真实目标。 的目标。 覆盖干扰是利用噪声或类噪声干扰信号来覆盖或淹没有用信号,使雷达无法探测到目标信息。 对于欺骗干扰,可以采用雷达信号识别方法进行检测和识别。 然而,对于利用噪声调制来掩蔽干扰信号,雷达信号检测和识别方法因其较强的随机性而难以采用。 然而,由于干扰信号在时间上是连续信号,因此在一定时间内的样本数量可能非常大; 对于雷达来说,累计数量受到目标照射时间和脉冲间隔的限制,这是干扰噪声检测的优势。 ,也成为寻求检测屏蔽干扰信号的突破口。
1 噪声调频信号功率谱检测原理
最常见的噪声调频干扰信号是射频振荡的频率与调制噪声电压ν(t)成线性关系。 为了便于噪声的频率调制,信号的时域如下: 式(1)
假设调制噪声电压ψ(t)为高斯噪声,其幅值概率密度分布为高斯函数。
由于噪声调频干扰的角频率与 Σ(t) 呈线性关系,因此瞬时角频率或角频率偏差的概率密度也应服从高斯分布,其均方根值为
式(6)中的积分只有在mfe》1且mfe》1时才能近似求解。
当mfe》1时,可得噪声FM信号的干扰带宽(半功率带宽)为
对于噪声调频信号,由于信号的随机性较强,利用相关方法很难检测出此类噪声调制信号,因此常用的瞬时相关、时频分布等检测方法效果不佳。 但由于接收系统在设计时热噪声是比较稳定的,因此它的热噪声功率谱也比较稳定。 当调频干扰信号进入接收机时,根据式(6),其在干扰频段的功率谱[f0 - △fj/2,f0 + △fj/2]在能量上会明显高于无干扰时。调频干扰信号。 改进后,基于此功能,可以检测干扰信号。 并相应地确定带宽和中心频率,如图1所示。
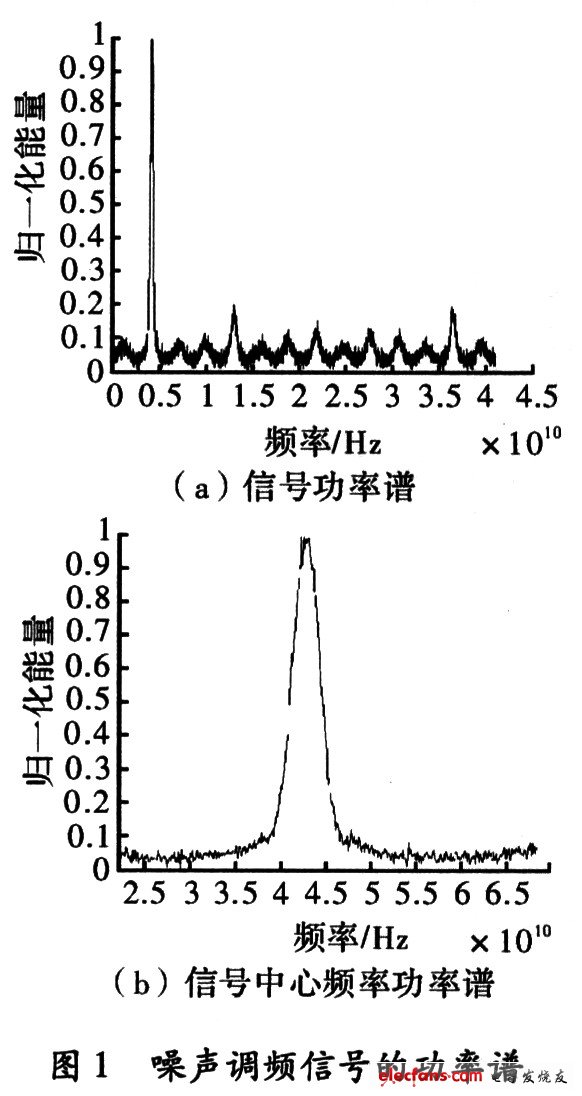
图 1 中噪声 FM 信号的中心频率为 4.3 GHz,每伏调制为 1 GHz/V,持续时间为 10 ms。 为了提高检测带宽,单次持续时间为100 ns,采样4 096个样本,累加过程重复10 000次。 实际情况下,一般至少需要几十毫秒的累积时间。 生成的白噪声调制信号首先经过256阶带通滤波器,对生成的白噪声滤波器进行着色。 通带为4.29~4.31 GHz,因此视频调制带宽为20 MHz。 将滤波后的随机数带入式(1),得到噪声调频信号,然后计算功率谱。 结果如图1(a)所示。 从图1(a)可以看出,在40 GHz的检测带宽下,信号的能量主要集中在4.3 GHz附近。 图1(b)是中心频率处的放大图。 可以看出,干扰信号的3 dB带宽(即0.707左右的归一化能量)为0.18 GHz,10 dB带宽(0.3左右的归一化能量)为0.37 GHz。
当白噪声添加到 FM 干扰中时,得到的功率谱如图 2 所示。
从图2可以看出,当SNR=-10 dB时,可以检测到噪声FM干扰信号,并且中心频率处的能量被衰减。 由于需要考虑仿真速度,这里花费的时间较短。 如果积累的时间加长,就相当于增加了能量的积累,得到的检测灵敏度会更高。 检测阈值的设置是实际应用中需要考虑的问题。 这里有两种确定参考阈值的方法。 首先,系统的热噪声是设计时确定的固有属性,比外部环境稳定得多。 设置阈值时,可以考虑当所有外部信号输入均被切断时,得到机器内部热噪声的平均功率作为阈值。 这样做的好处是保证此时的噪声是纯净的。 缺点是没有考虑环境噪声的存在,从而增加了误报的概率。 这也是本文使用的方法; 二是侦察天线未与干扰源对准时。 此时,获取内外混合噪声各频点的平均功率作为参考阈值。 优点是能够真实反映实际情况。 但如果此时有其他发射机的输入信号,误报检测的概率就会大大增加。 。
2 相似理论
在信号与系统学科中,相关性是描述时域信号特征的重要方法。 由于信号及其功率谱函数是一对傅里叶变换,因此在信号分析中常用于分析随机信号的功率谱分布。 因此,很多人一提到相关性就会立刻想到信号功率谱的计算。 假设获得的两个信号分别为X(t)和Y(t)。 可以选择多个K,使KY(t)接近X(t)。 误差能量可以用来衡量波形的相似度。
其中 Er 代表误差能量,K 的选择是为了最小化误差能量。 可以得出结论
此外,相对误差能量可以定义为
其中Pxy为相关系数。可推出
对于能量有限的信号,能量确定了,相关系数的大小仅由X(t)*Y(t)的积分决定。 如果两个完全不相似的信号,其幅值和出现次数相互独立且无关,即X(t)*Y(t)=0,则积分结果也为0,因此当相关系数为O 当相似度最差时,即不相关。 当相关系数为1时,误差能量为0,说明两个信号非常相似,呈线性相关。 因此,用相关系数来衡量两个信号的相似程度是完全有理论依据的、合理的。
3 利用相似理论检测噪声FM信号
为了讨论方便,假设接收机是理想接收机,即在通带内,其幅频特性为定值,相频为线性,通带外增益为零,中心频率ω0远大于接收机带宽△ω,并且假设背景噪声为高斯白噪声,这个假设不失一般性,基本上可以很好地描述常规接收机的检测特性。
在 1 ms 的持续时间内,进行了 100 次蒙特卡罗实验,信噪比范围为 -10 至 10 dB。 信号的具体形式如第2节所述。首先获得信号和参考白噪声各自的功率谱,然后代入式(12),计算其相关系数。考虑到虚假的可能性报警时,通常认为相关系数
从图3可以看出,当信噪比在-3 dB以上时,在0.1 ms的时间内可以实现100%的检测。 充分说明该方法对于噪声调频信号的检测和识别是可行的。 而且,根据积累时间的不同,对算法检测的灵敏度也有很大的影响。 图4显示了10次不同累积时间的蒙特卡罗实验的检测概率。
从图4可以看出,随着时间的增加,不仅检测灵敏度明显提高,而且检测曲线更加平滑,误差减小。
4。结论
由于噪声调频信号具有很强的随机性,各种相关的检测方法无法有效地检测出此类信号。 本文采用功率谱累加和相似函数的方法来检测噪声调频信号。 通过仿真实验验证了该方法的可行性,并说明了检测概率、信噪比和累积时间长度之间的关系。
电子干扰是现代电子战的重要组成部分,包括无源干扰和有源干扰。 有源干扰可分为欺骗干扰和掩蔽干扰。 欺骗干扰是利用虚假目标和信息作用于雷达的目标探测和跟踪系统,使雷达无法正确探测真实目标或无法正确测量真实目标的参数信息,从而迷惑或扰乱雷达的探测和跟踪。的真实目标。 的目标。 覆盖干扰是利用噪声或类噪声干扰信号来覆盖或淹没有用信号,使雷达无法探测到目标信息。 对于欺骗干扰,可以采用雷达信号识别方法进行检测和识别。 然而,对于采用噪声调制的干扰信号的屏蔽,由于其随机性较强,很难采用雷达信号检测识别方法。 然而,由于干扰信号在时间上是连续信号,因此在一定时间内的样本数量可能非常大; 对于雷达来说,累计数量受到目标照射时间和脉冲间隔的限制,这是干扰噪声检测的优势。 ,也成为寻求检测屏蔽干扰信号的突破口。
1 噪声调频信号功率谱检测原理
最常见的噪声调频干扰信号是射频振荡的频率与调制噪声电压ν(t)成线性关系。 为了便于噪声的频率调制,信号的时域如下: 式(1)
假设调制噪声电压ψ(t)为高斯噪声,其幅值概率密度分布为高斯函数。
由于噪声调频干扰的角频率与 Σ(t) 呈线性关系,因此瞬时角频率或角频率偏差的概率密度也应服从高斯分布,其均方根值为
式(6)中的积分只有在mfe》1且mfe》1时才能近似求解。
当mfe》1时,可得噪声FM信号的干扰带宽(半功率带宽)为
对于噪声调频信号,由于信号的随机性较强,利用相关方法很难检测出此类噪声调制信号,因此常用的瞬时相关、时频分布等检测方法效果不佳。 但由于接收系统在设计时热噪声是比较稳定的,因此它的热噪声功率谱也比较稳定。 当调频干扰信号进入接收机时,根据式(6),其在干扰频段的功率谱[f0 - △fj/2,f0 + △fj/2]在能量上会明显高于无干扰时。调频干扰信号。 改进后,基于此功能,可以检测干扰信号。 并相应地确定带宽和中心频率,如图1所示。
图 1 中噪声 FM 信号的中心频率为 4.3 GHz,每伏调制为 1 GHz/V,持续时间为 10 ms。 为了提高检测带宽,单次持续时间为100 ns,采样4 096个样本,累加过程重复10 000次。 实际情况下,一般至少需要几十毫秒的累积时间。 生成的白噪声调制信号首先经过256阶带通滤波器,对生成的白噪声滤波器进行着色。 通带为4.29~4.31 GHz,因此视频调制带宽为20 MHz。 将滤波后的随机数带入式(1),得到噪声调频信号,然后计算功率谱。 结果如图1(a)所示。 从图1(a)可以看出,在40 GHz的检测带宽下,信号的能量主要集中在4.3 GHz附近。 图1(b)是中心频率处的放大图。 可以看出,干扰信号的3 dB带宽(即0.707左右的归一化能量)为0.18 GHz,10 dB带宽(0.3左右的归一化能量)为0.37 GHz。
当白噪声添加到 FM 干扰中时,得到的功率谱如图 2 所示。
从图2可以看出,当SNR=-10 dB时,可以检测到噪声FM干扰信号,并且中心频率处的能量被衰减。 由于需要考虑仿真速度,这里花费的时间较短。 如果积累的时间加长,就相当于增加了能量的积累,得到的检测灵敏度会更高。 检测阈值的设置是实际应用中需要考虑的问题。 这里有两种确定参考阈值的方法。 首先,系统的热噪声是设计时确定的固有属性,比外部环境稳定得多。 设置阈值时,可以考虑当所有外部信号输入均被切断时,得到机器内部热噪声的平均功率作为阈值。 这样做的好处是保证此时的噪声是纯净的。 缺点是没有考虑环境噪声的存在,从而增加了误报的概率。 这也是本文使用的方法; 二是侦察天线未与干扰源对准时。 此时,获取内外混合噪声各频点的平均功率作为参考阈值。 优点是能够真实反映实际情况。 但如果此时有其他发射机的输入信号,误报检测的概率就会大大增加。 。
2 相似理论
在信号与系统学科中,相关性是描述时域信号特征的重要方法。 由于信号及其功率谱函数是一对傅里叶变换,因此在信号分析中常用于分析随机信号的功率谱分布。 结果,很多人一提到相关性就立刻想到信号功率谱的计算。 假设获得的两个信号分别为X(t)和Y(t)。 可以选择多个K,使KY(t)接近X(t)。 误差能量可以用来衡量波形的相似度。
其中 Er 代表误差能量,K 的选择是为了最小化误差能量。 可以得出结论
此外,相对误差能量可以定义为
其中Pxy为相关系数。可以推出
对于能量有限的信号,能量确定了,相关系数的大小仅由X(t)*Y(t)的积分决定。 如果两个完全不相似的信号,其幅值和出现次数相互独立且无关,即X(t)*Y(t)=0,则积分结果也为0,因此当相关系数为O 当相似度最差时,即不相关。 当相关系数为1时,误差能量为0,说明两个信号非常相似,呈线性相关。 因此,用相关系数来衡量两个信号的相似程度是完全有理论依据的、合理的。
3 利用相似理论检测噪声FM信号
为了讨论方便,假设接收机是理想接收机,即在通带内,其幅频特性为定值,相频为线性,通带外增益为零,中心频率ω0远大于接收机带宽△ω,并且假设背景噪声为高斯白噪声,这个假设不失一般性,基本上可以很好地描述常规接收机的检测特性。
在 1 ms 的持续时间内,进行了 100 次蒙特卡罗实验,信噪比范围为 -10 至 10 dB。 信号的具体形式如第2节所述。首先获得信号和参考白噪声各自的功率谱,然后代入式(12),计算其相关系数。考虑到虚假的可能性报警时,通常认为相关系数
从图3可以看出,当信噪比在-3 dB以上时,在0.1 ms的时间内可以实现100%的检测。 充分说明该方法对于噪声调频信号的检测和识别是可行的。 而且,根据积累时间的不同,对算法检测的灵敏度也有很大的影响。 图4显示了10次不同累积时间的蒙特卡洛实验的检测概率。
发表评论:
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。